Präzisions-Servo-Gleichstrommotor 46S/185-8A

Grundmerkmale des Servo-Gleichstrommotors: (andere Modelle, Leistung kann angepasst werden)
| 1.Nennspannung: | Gleichstrom 7,4 V | 5. Nenngeschwindigkeit: | ≥ 2600 U/min |
| 2. Betriebsspannungsbereich: | Gleichstrom 7,4 V-13 V | 6. Blockierstrom: | ≤2,5A |
| 3.Nennleistung: | 25W | 7.Ladestrom: | ≥1A |
| 4. Drehrichtung: | Die CW-Abtriebswelle ist oben | 8. Wellenspiel: | ≤1,0 mm |
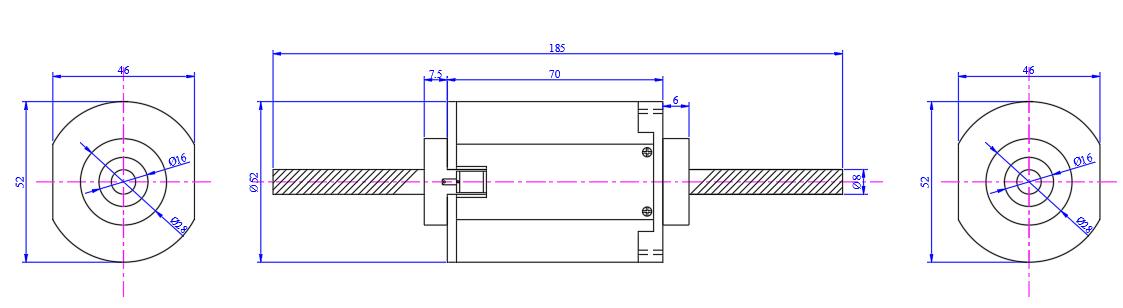
Produkterscheinungsdiagramm
Ablaufzeit
Seit dem Produktionsdatum beträgt die sichere Nutzungsdauer des Produkts 10 Jahre und die ununterbrochene Arbeitszeit ≥ 2000 Stunden.
Produktmerkmale
1.Kompaktes, platzsparendes Design;
2.Kugellagerstruktur;
3.Lange Lebensdauer der Bürste;
4. Der externe Zugang zu den Bürsten ermöglicht einen einfachen Austausch, um die Lebensdauer des Motors weiter zu verlängern.
5.Hohes Anlaufdrehmoment;
6.Dynamisches Bremsen, um schneller anzuhalten;
7.Umkehrbare Drehung;
8.Einfache Zweidrahtverbindung;
9. Isolierung der Klasse F, Hochtemperatur-Schweißkommutator.
10.Hohe Leistung, hohe Kostenleistung und geringe Interferenz.
Anwendungen
Es wird häufig in den Bereichen Smart Home, medizinische Präzisionsgeräte, Automobilantrieb, Unterhaltungselektronikprodukte, Massage- und Gesundheitsgeräte, Körperpflegegeräte, intelligente Roboterübertragung, industrielle Automatisierung, automatische mechanische Geräte, digitale Produkte usw. eingesetzt.
Leistungsdarstellung



Servosystem: Es handelt sich um ein automatisches Steuerungssystem, das es den ausgangsgesteuerten Größen wie Position, Ausrichtung und Zustand eines Objekts ermöglicht, jeder Änderung des Eingabeziels (oder eines gegebenen Werts) zu folgen. Die Hauptaufgabe des Servos besteht darin, die Leistung entsprechend den Anforderungen des Steuerbefehls zu verstärken, umzuwandeln und zu regeln, sodass das vom Antriebsgerät ausgegebene Drehmoment, die Geschwindigkeit und die Position sehr flexibel und komfortabel gesteuert werden können.
Aufgrund seiner „Servo“-Leistung wird er Servomotor genannt. Seine Funktion besteht darin, das Eingangsspannungssteuersignal in die Ausgangswinkelverschiebung und Winkelgeschwindigkeit auf der Welle umzuwandeln, um das Steuerobjekt anzutreiben.
Prinzip des DC-Servomotors
Das Funktionsprinzip eines Gleichstrom-Servomotors ist grundsätzlich das gleiche wie das eines gewöhnlichen Gleichstrommotors. Das elektromagnetische Drehmoment wird durch die Wirkung des Ankerluftstroms und des Luftspaltmagnetflusses erzeugt, um den Servomotor in Drehung zu versetzen. Normalerweise wird die Ankersteuerungsmethode verwendet, um die Geschwindigkeit durch Änderung der Spannung zu ändern und gleichzeitig die Erregerspannung konstant zu halten. Je kleiner die Spannung, desto geringer die Drehzahl, und wenn die Spannung Null ist, stoppt die Drehung. Denn wenn die Spannung Null ist, ist auch der Strom Null, sodass der Motor kein elektromagnetisches Drehmoment erzeugt und auch das Phänomen der Selbstrotation nicht auftritt.







